Laboratory研究室・教員紹介
制御・ロボティクス系
システム制御研究室
研究紹介
様々なシステムの制御方法の研究
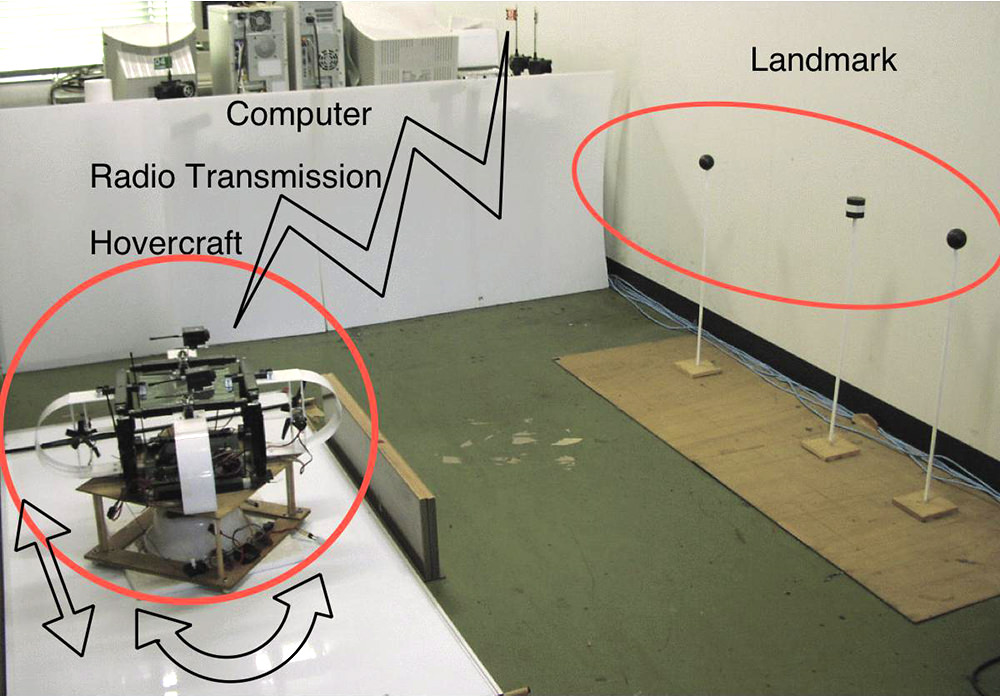
システム制御理論(制御系設計方法)とその応用を研究しています。様々な要素を有機的に接続構成されたものがシステムです。ロボットもその代表例です。制御はそのシステムの動きをデザインする科学といえます。
応用として全身型パワー増幅ロボットの開発を進めています。これは、重作業支援用として高出力なロボットアームを人間の四肢の動きに追従させることで、人間の力が数百倍に増幅されたかのような感覚で、重作業を行うことができるロボットです。平常時には重作業に使用し、災害発生時には人命救助・復旧作業などに適用する社会的意義の大きいものです。

教員紹介
井上 健准教授
