Laboratory연구실 및 교수진 소개
제어-로보틱스 분야
제어공학 연구실
연구 소개
새로운 시스템 구축을 위한 연구
제어공학은 시간에 따라 변화하는 시스템을 다루는 학문입니다. 그리고 특정 시스템을 대상으로 하는 것이 아니라 다양한 시스템을 폭넓게 일반적으로 다룰 수 있습니다.
아직 실현되지 않은 복잡하고 새로운 시스템을 만들기 위해서는 시스템의 물리적 설계뿐만 아니라 그 제어 방법도 동시에 고려해야 한다.
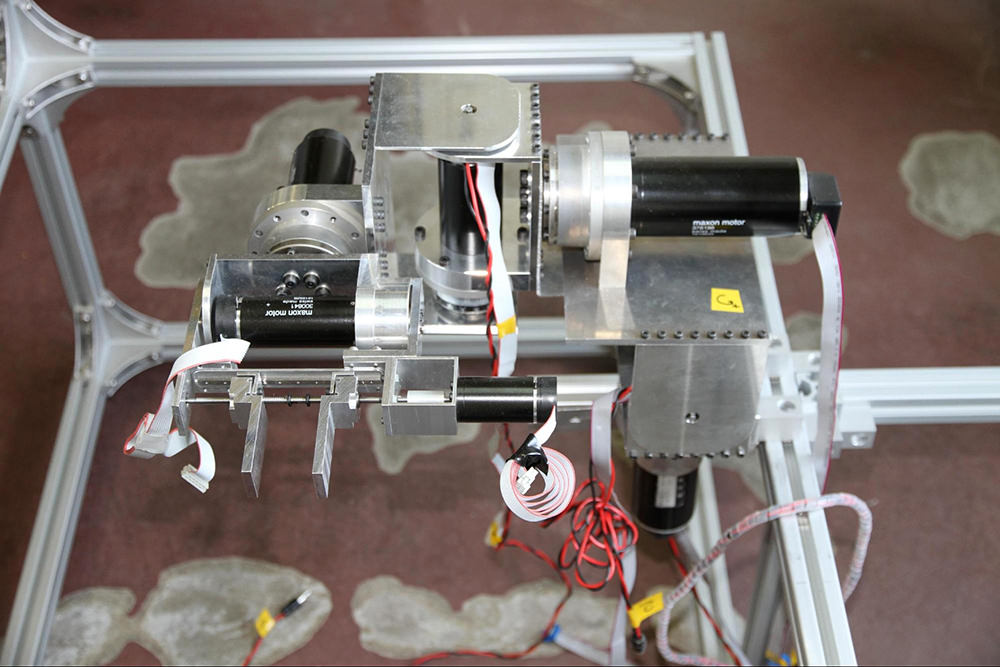
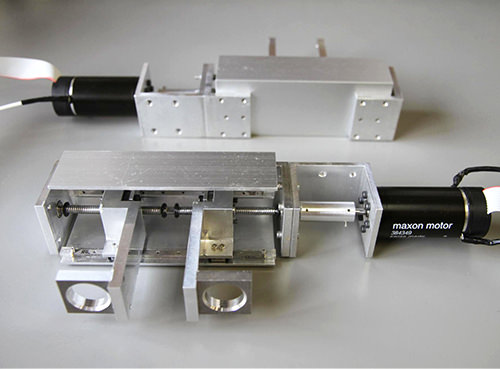
예를 들어, 힘 제어 관련 연구에서는 원격지에 있는 로봇 매니퓰레이터의 힘을 오퍼레이터에게 정확하게 전달하고, 마치 실제 대상을 조작하는 것과 같은 환경(가상현실)을 만드는 기술을 연구하고 있다. 이때 로봇 팔과 오퍼레이터의 조작부 구조와 동시에 그 제어 방법도 함께 설계하는 것이다.
또한, 폐쇄형 생태계 연구에서는 우주정거장과 같은 폐쇄된 공간에서 인간이 장기간 체류하기 위해 지구와 같이 식량 생산과 공기, 물 등 모든 물질의 순환을 실현하고자 한다. 이를 위해서는 먼저 시스템이 안정화될 수 있는 조건을 찾고, 이를 실현하기 위한 장치와 물질 순환의 제어 방법을 고민해야 합니다.
이처럼 제어공학은 다양한 새로운 시스템을 구현하기 위한 학문이다.
교수진 소개
Prof.Hiroaki Yoshida
- 연구분야
- 기계 역학 및 제어 / 지능형 기계 및 기계 시스템 / 제어 공학
- 연구 키워드
- 계측 및 제어 공학 / 힘 제어 / 마스터-슬레이브 시스템 / 서브오비탈 우주선 / 폐쇄형 생태계 / 재료 설계 / 최적화 기법
