Laboratory研究室和教职员工介绍
控制和机器人系统
控制工程学研究室
研究介绍
实现新系统的研究
控制工程是处理随时间变化的系统。 然后,您可以广泛、广泛地处理各种系统,而不是针对特定系统。
为了创建一个尚未实现的复杂新系统,我们不仅要考虑系统的物理设计,还要考虑如何控制它。
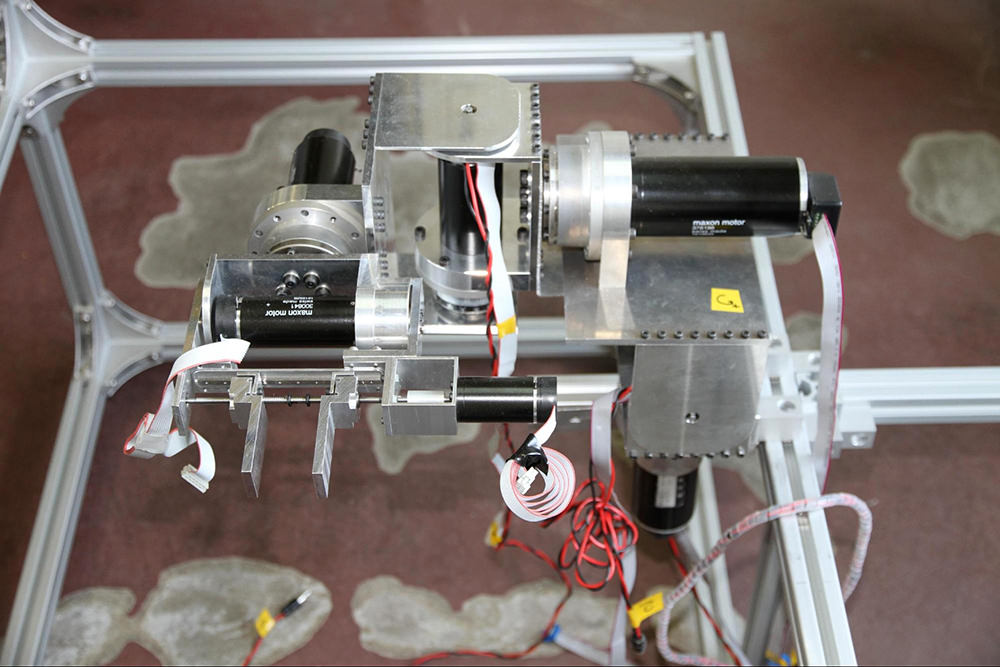
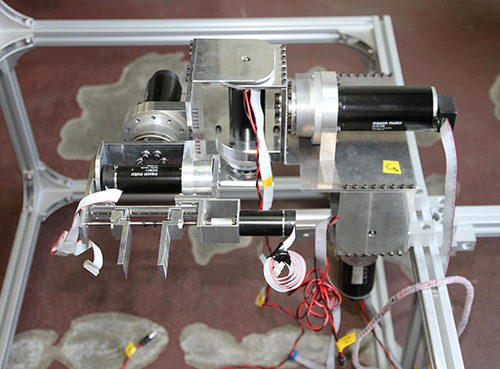
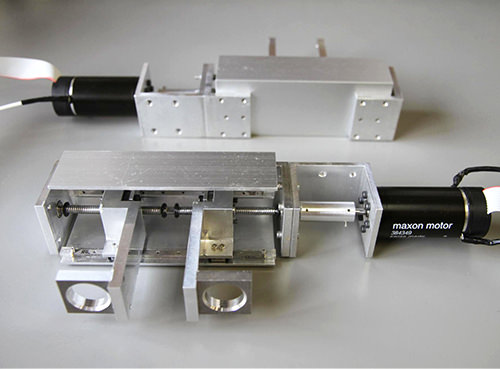
例如,在力控制研究中,我们研究了一种技术,该技术将远程机器人操纵器的力准确地传达给操作员,并创造一种环境(虚拟现实),就像它们实际操作对象一样。 此时,在设计机械臂和操作员操作单元的结构的同时,还设计了控制方法。
此外,在封闭生态系统的研究中,我们试图实现食物的生产,如地球和空气和水等所有物质的循环,以便人类在封闭的空间(如空间站)中停留更长时间。 为此,我们必须首先确定系统稳定的条件,然后考虑如何控制设备和材料循环来实现这一点。
因此,控制工程是实现各种新系统的一门学科。
教职员工介绍
吉田 洋明教授
- 研究领域
- 机械力学与控制 / 智能机械学 / 机械系统 / 控制工程
- 研究关键词
- 测量和控制工程 / 力控制 / 主从系统 / 子轨道航天器 / 封闭生态系统 / 材料设计 / 优化方法
