Laboratory研究室和教职员工介绍
控制和机器人系统
系统控制学研究室
研究介绍
各种系统控制方法的研究
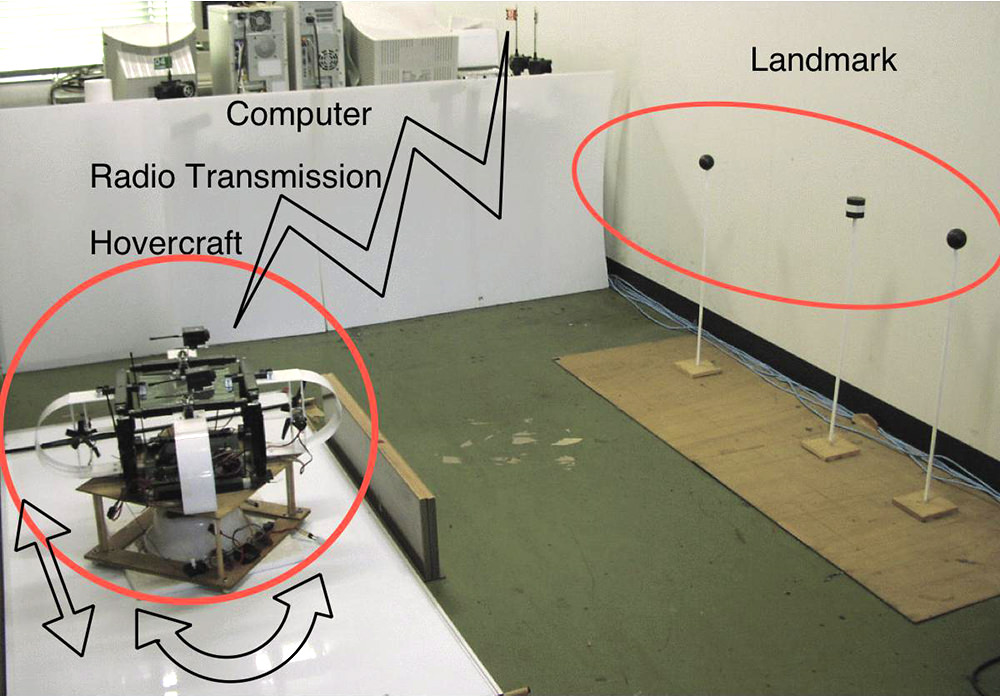
研究了系统控制理论(控制系统设计方法)及其应用。 系统由有机连接各种元素组成。 机器人就是一个很好的例子。 控制是设计系统运动的科学。
作为应用,我们正在开发全身功率放大机器人。 这是一个机器人,可以通过让高功率机械臂跟随人的四肢运动来支持重型工作,从而完成繁重的工作,就像人类的力量被放大了几百倍一样。 它通常用于繁重的工作,在发生灾害时应用于拯救生命和恢复工作,具有重大的社会意义。

教职员工介绍
井上 健准教授
