ニューロロボット
NurorobotsWalkの歩容(左前脚、右後脚、右前脚、左後脚の順番で脚が動きます)
Trotの歩容(左前脚と右後脚、右前脚と左後脚がセットで動きます)
生物に学んでロボットに命を宿す研究
ニューロロボットとは、生物の脳の構造や情報処理の仕組みを模倣したニューロ回路を搭載したロボットを指します。これにより、従来のプログラム制御型ロボットとは異なり、環境の変化に柔軟に適応し、自律的に動作することが可能になります。ニューロ回路は、生物の神経ネットワークに似た構造を持つ電子回路であり、効率的かつ低消費電力で複雑な処理を実現します。 この技術は、制御が難しい状況や不確定な環境下でもロボットが適応して行動できるようにするだけでなく、創造的な問題解決能力をロボットに付与する可能性を秘めています。
ニューロロボットとは
生物の脳は、驚くべき適応性と柔軟性を備えており、未知の環境や複雑な状況にも対応できる高い能力を持っています。
当研究室では、生物の神経回路を模倣したニューロモルフィック回路を活用し、次世代の自律型ロボットの開発に取り組んでいます。
このニューロモルフィック回路は、従来のデジタル制御に依存せず、環境に適応しながら自律的に動作するロボットの実現を可能にします。
現在、四足歩行型ロボットを対象に、以下の研究テーマを中心に研究を進めています。

ニューロロボットの開発実績

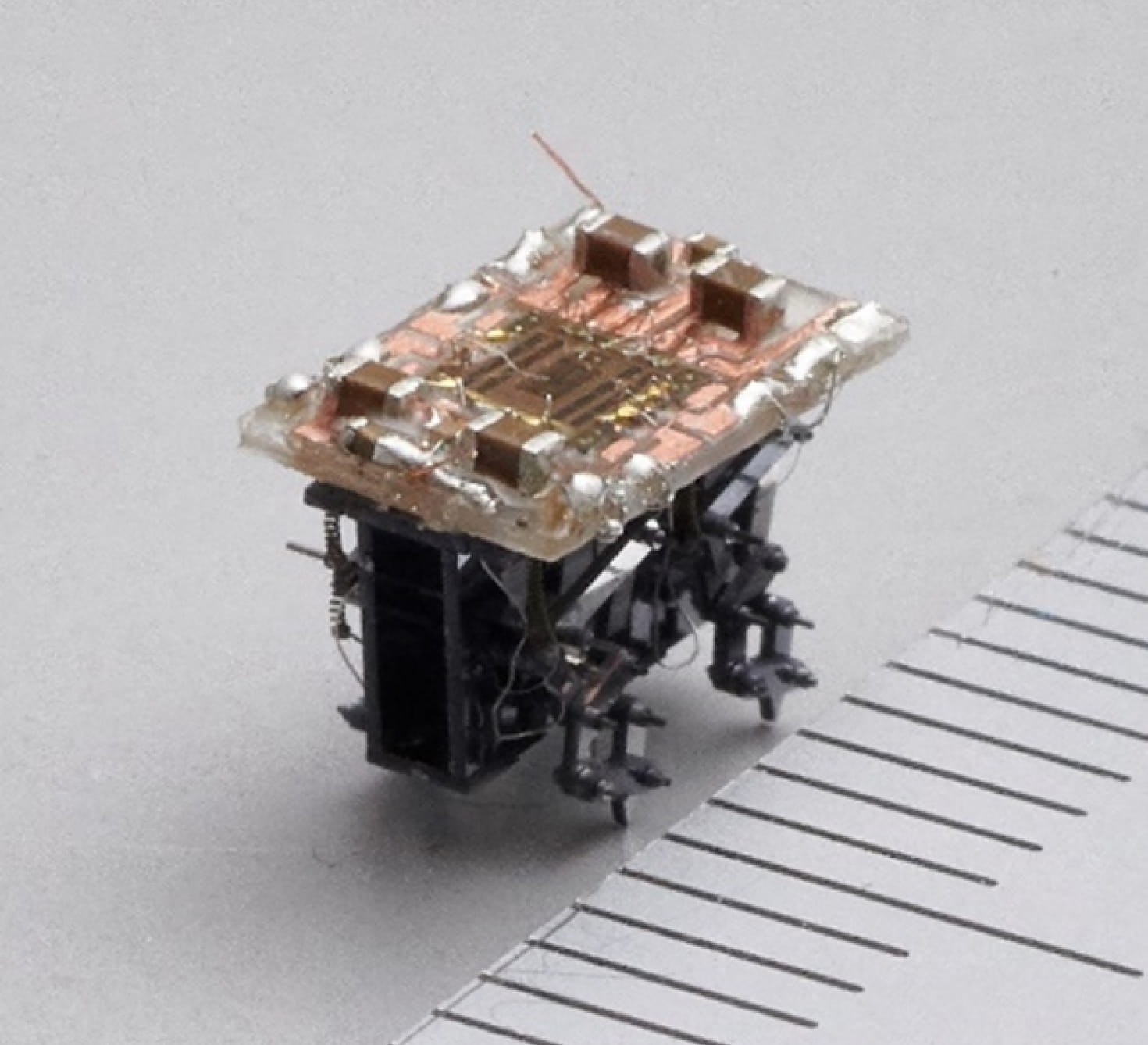
研究当初は生物の中枢パターン生成器の働きを模倣した回路を搭載していました。

ニューロロボットのプロトタイプです。配線が複雑で、回路から毛のように伸びていました。

2代目では配線や回路を工夫してスッキリしました。

3代目でははんだ付けで作製していたニューロ回路を集積回路に置き換えました。はんだ付けで作製してたニューロ回路と比較して回路間のバラツキが少なく安定しています。

4代目はラクダを模倣した体形に変更したことで、今までのロボットでできなかった側対歩(人間のナンバ歩き)ができるようになりました。

5代目は今までマイクロコントローラを使用してセンサの情報処理をしていた箇所を、受容細胞モデルを新たに開発して、コンピュータプログラム不要で処理できるようにしました。
ニューロロボットの解析
作製したラクダ型や馬型のニューロロボットを用いて、歩行に必要なエネルギー効率を解析しています。
歩容に応じた移動速度とエネルギー消費(移動コスト)を評価し、省エネルギー性の高い動作パターンを解析しました。特に新たに生成されたペース歩容は、トロット歩容よりも移動コストが低いことを確認しました。
今後、生物を手本とした省エネルギー型ロボットの設計を進める予定です。

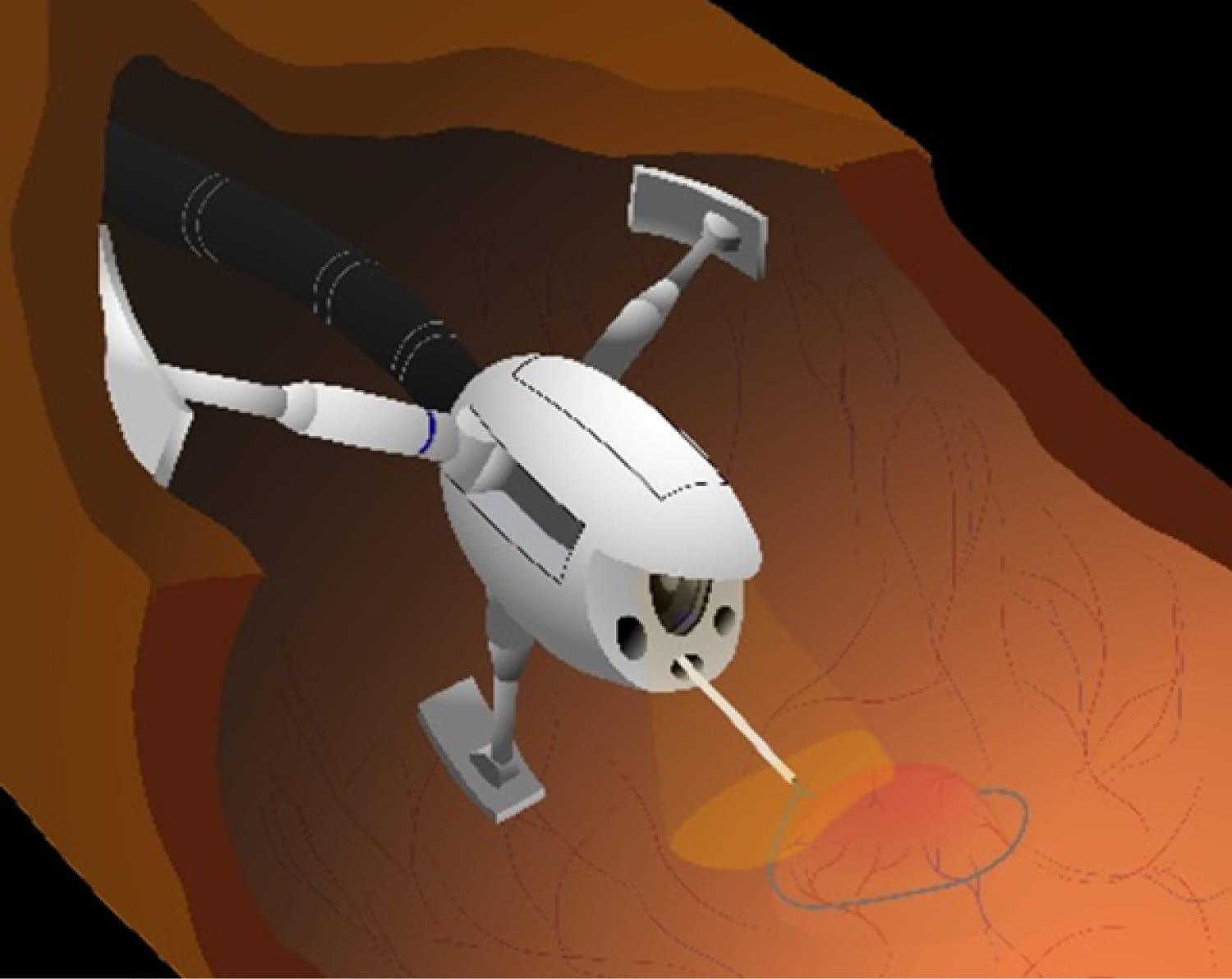
ねずみ型ロボット
ニューロロボットはサーボモータを利用して動作していますが、生物の筋肉と異なり回転動作です。生物を模倣するために、筋肉と同じ往復動作で動作するねずみ型ロボットを開発しました。動作原理を変更することで、ニューロ回路もより生物に似た構成に変更する必要があります。
ねずみ型ロボットを進化する事で極めて生物に近いロボットの実現を目指しています。