医療用ロボット
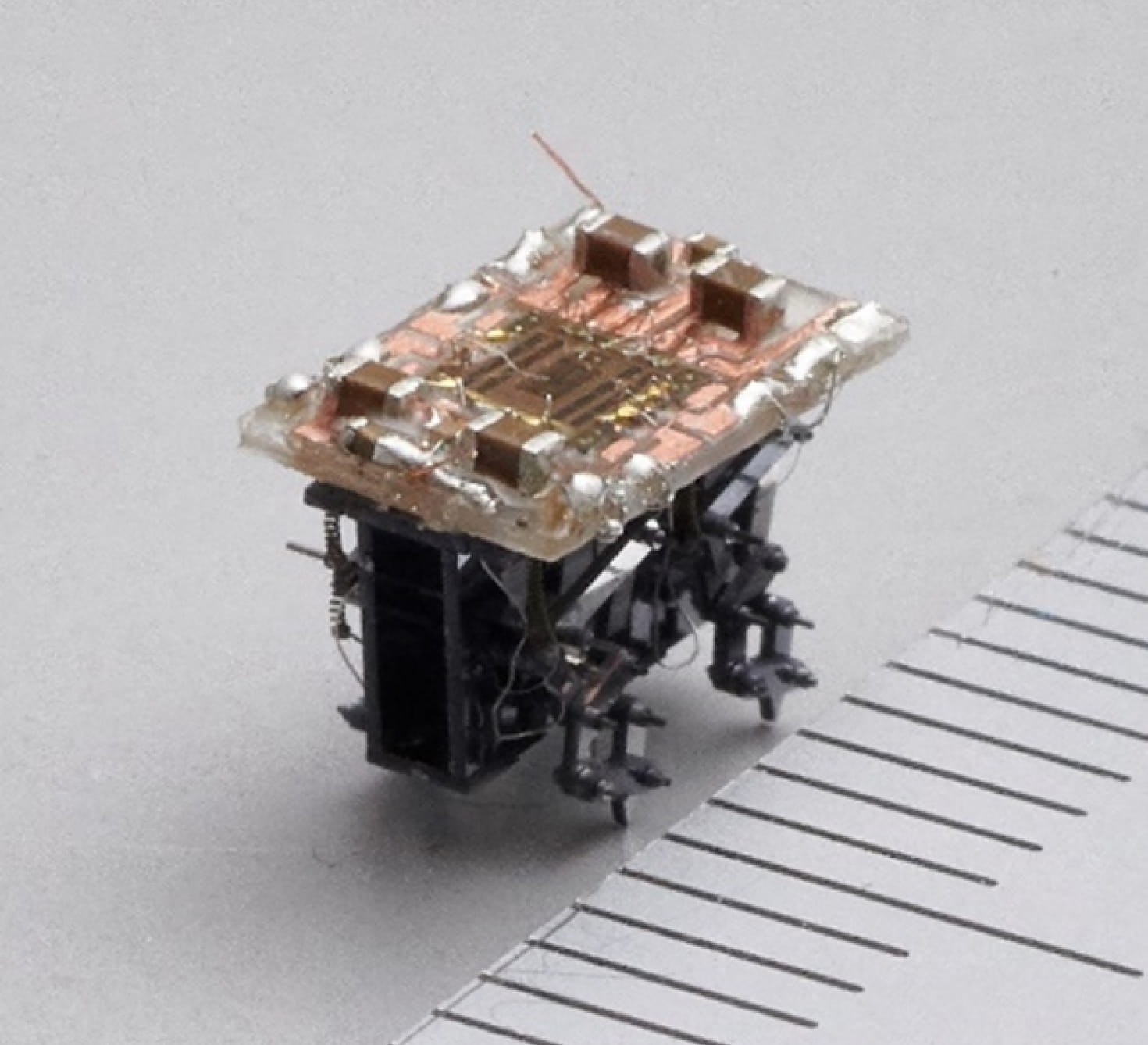
Medical Robots医療用ロボットの脚が展開する様子
ロボット技術で医療を助ける研究
医療用ロボットは、精密な手術や診断のサポート、患者の負担軽減を目指した次世代医療技術として注目されています。近年、技術の進展により、より小型で高性能なロボットが実用化されつつあり、医療現場における応用が広がっています。当研究室では、医療分野に特化したロボット技術の開発に取り組んでいます。
医療用ロボットとは
医療用ロボットは、人間の手では実現が難しい高精度な操作や診断を支援するために設計されたロボット技術です。例えば、腸管内を移動するマイクロロボットや、手術時の手振れを補正するデバイスなど、多様な用途に対応可能な技術が開発されています。これらのロボットは、高い精度、低侵襲性、そして操作の簡便性を実現することを目的としています。
研究室では、腸管内での診断や治療を可能にするマイクロロボットや、手術を支援する精密デバイスの開発を進めています。これらのロボットは、患者の負担を軽減し、医師の効率を向上させることを目指して設計されています。また、集積回路技術やAI技術を活用し、さらなる機能向上と実用化を目指しています。

医療用ロボットの開発実績

研究当初は血管の中や胃の中で活躍するロボットを考えていましたが、医学部の先生とディスカッションを重ねて大腸にしました。

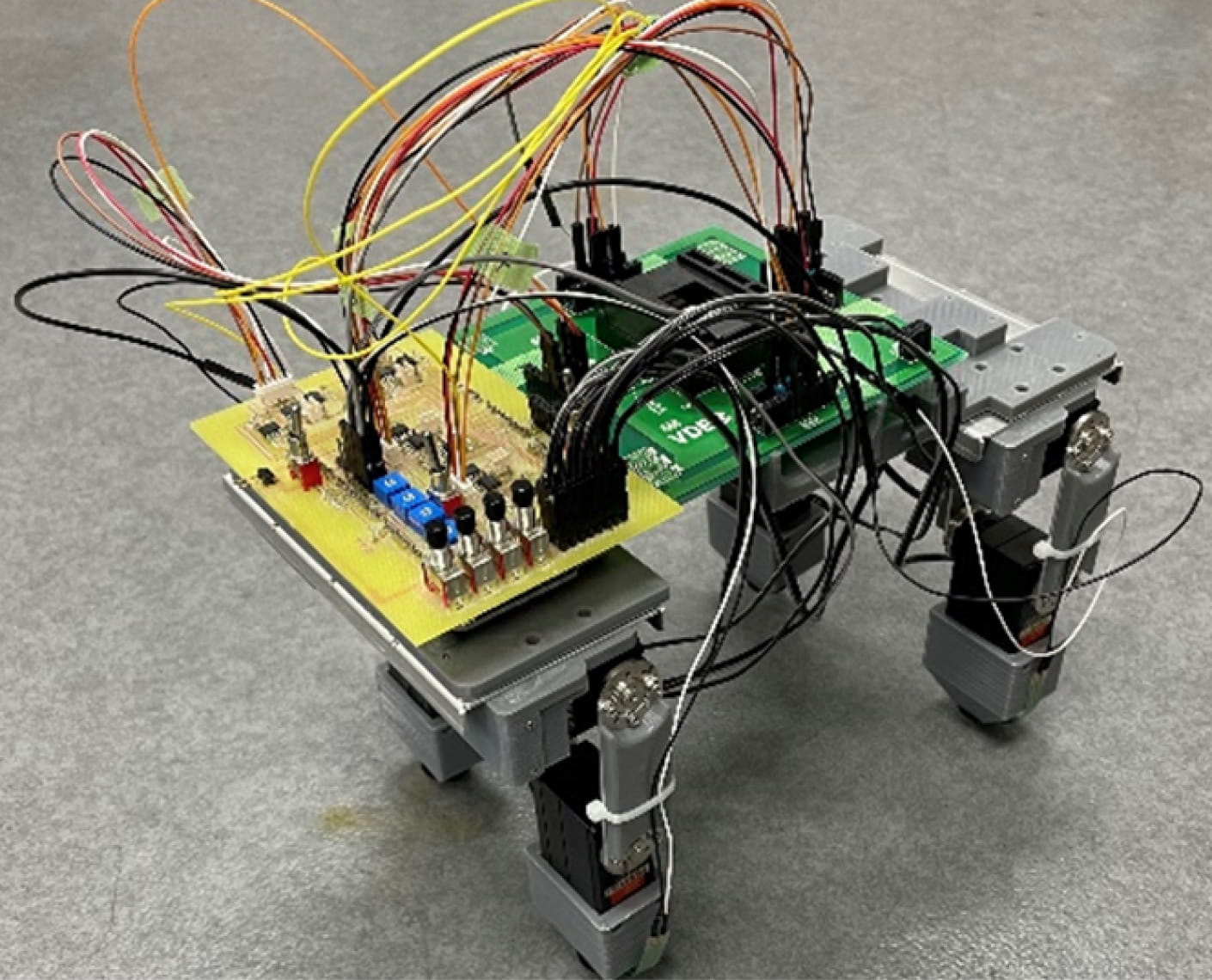
先ずは安価な3Dプリンタで作製してみました。

光造形の3Dプリンタを使用すればきれいに印刷的できます。

金属で部品を作製するとスムーズに動きます。
腸管内マイクロロボット
腸管内を自律的に移動し、診断や治療を行うロボットを開発しています。開発中の腸管内ロボットは、カプセル型を採用し、腸管内に移動する機構を備えています。パンダグラフ機構やラックアンドピニオン機構を用いることで、狭小空間での前進と固定を可能にしました。このロボットは、内視鏡挿入時の負担を軽減し、精密な診断を支援します。

手振れ補正デバイス
手術時の手ぶれを補正するデバイスを開発しています。このデバイスには、9軸ジャイロセンサとリアクションホイールを搭載しており、センサデータに基づきモータを駆動して手ぶれを補正します。これにより、低価格かつ高精度な手術支援が可能になります。