マイクロロボット
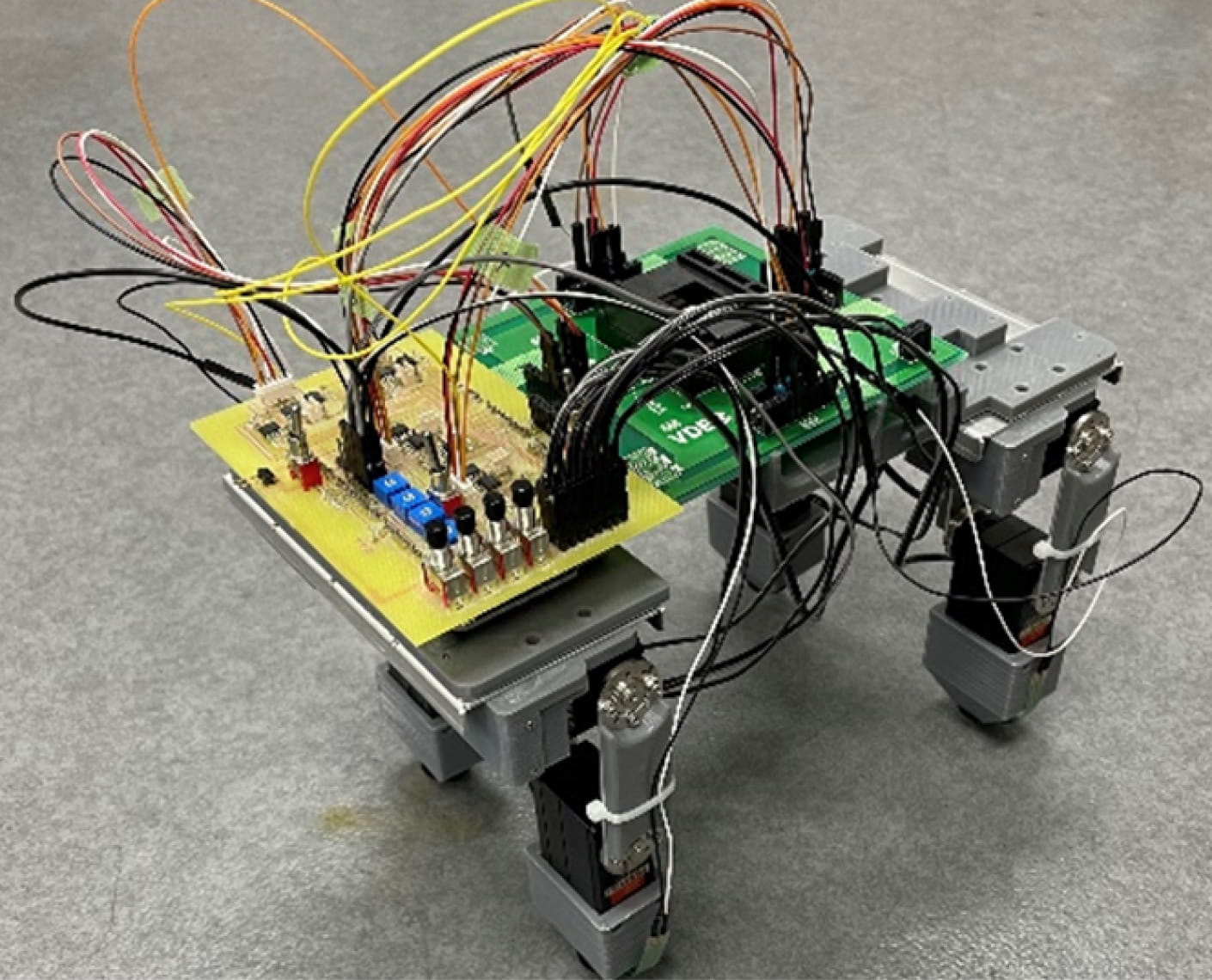
microrobots4足歩行マイクロロボット
6足歩行マイクロロボット
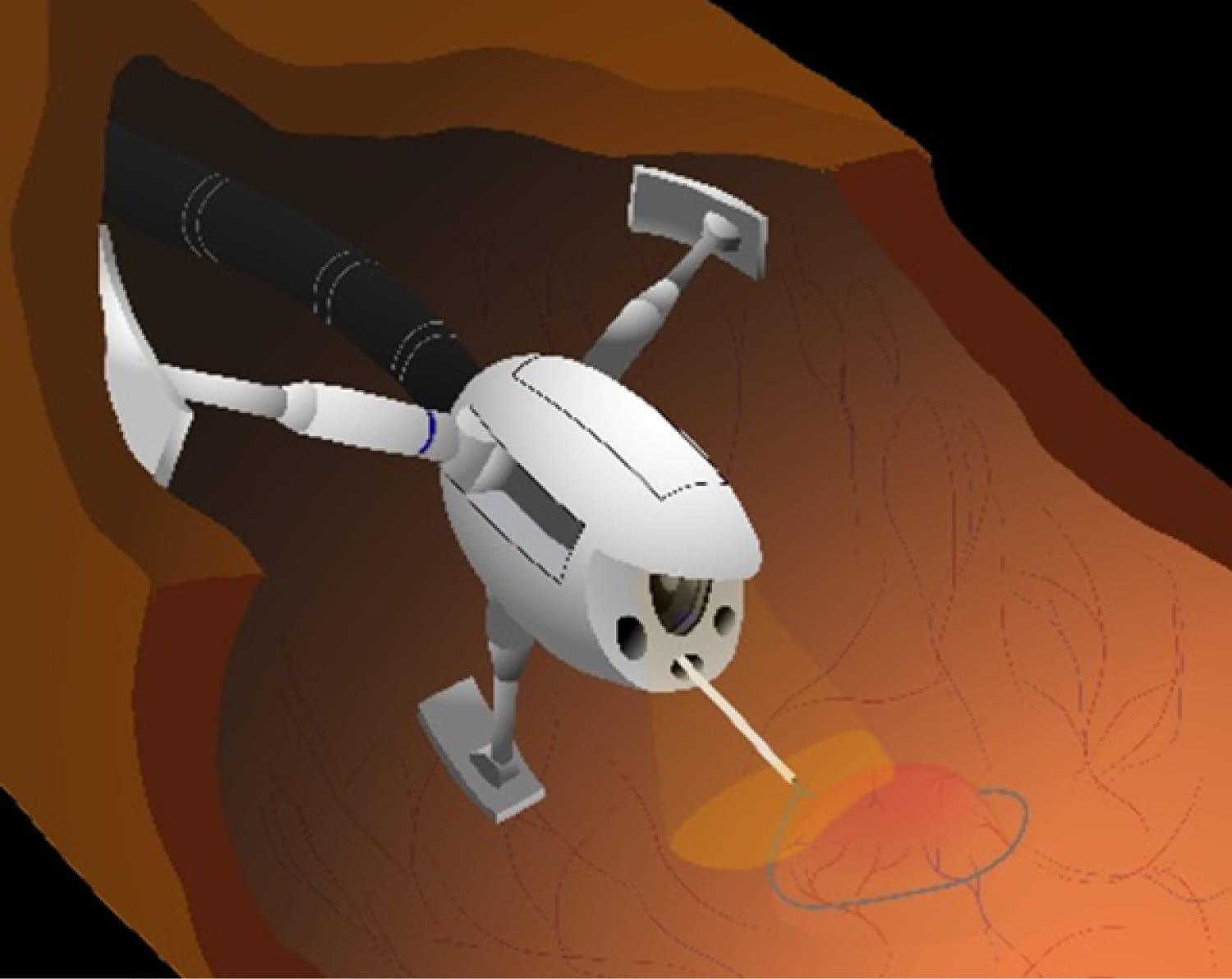
世界最小の昆虫型ロボットを開発する研究
マイクロロボットは、その極小サイズによって従来のロボットが果たせない役割を担う次世代技術として注目されています。
小型化と機能集約を進めることで、産業分野や精密作業への応用が期待されています。ニューロロボティクス研究室では、集積回路技術と微細加工技術を駆使し、世界最小クラスの昆虫型ロボットの開発に取り組んでいます。
マイクロロボットとは
マイクロロボットとは、ミリメートルまたはそれ以下のサイズを持ちながら、センサ、アクチュエータ、制御回路やエネルギー源を統合したロボットです。
その特性として、極小サイズでの自律的な移動や操作が可能であり、エネルギー効率と高い機能性を兼ね備えています。
当研究室では、マイクロロボットの小型化と高性能化に向けた研究を行っています。
静電モータと脚部機構の一括形成技術や、動体検知可能な受容細胞モデルを用いたセンサ技術を駆使し、自律的かつ効率的な動作を実現するロボットの開発を進めています。また、微細加工技術を活用することで、複雑な構造を効率的に製造し、さらなる小型化と性能向上を目指しています。

マイクロロボットの開発実績

初めて微細加工技術でシリコンウェハを加工したロボットが右側です。左側はダウンサイジングをしました。

圧電素子で動くマイクロロボットも作成しました。

小形のマイクロコントローラを搭載したロボットは5円玉の中央の穴にすっぽり入るサイズです。

オリジナルの集積回路でロボットの動作制御をできるようになりました。

脚を一本一本独立して動かすことに成功しました。

足追加して昆虫のように6足歩行にもできます。
静電モータを用いたマイクロロボット
MEMS技術で製造した静電モータを基盤に、脚部と駆動機構を一括形成することで、低消費電力かつ高効率なマイクロロボットの開発を進めています。
回転型やリニア型静電モータの設計と最適化により、多様な動作を安定して実現しており、小型化やエネルギー効率の向上を目指しています。
これらの技術を通じて、精密作業や産業分野で活躍できる次世代ロボットの実現を目指しています。

動体検知センサを搭載したマイクロロボット
生物の受容細胞機能を模倣した動体検知回路を用いて、外部環境を認識し、動体の運動方向を検知できるロボットを開発しています。
この技術は昆虫の視覚システムを参考にした相関型運動検出器モデルを基盤としており、移動体の方向選択的な検知が可能です。
この機能により、動的環境下での適応的な動作が実現できます。