Uchikoba Kaneko Lab.

Reseach Activitiesreport
Insect Type Microrobot for Future Medical Applications and Artificial Life

By MEMS Technology, miniaturized components are formed from silicon wafer. These components are assembled into microrobot within 5mm. Also, Neural networks CMOSICs are developed and mounted on the microrobot. Two types of actuators are developed, artificial muscle wire type and multilayer piezo type. Currently, batteries has not been mounted on the robot, because any batteries are too big. Then they are connected by lead wires. Our microrobot realize foot step motions like real insects. The size is 4mmx4.6mmx3.6mm.
Ultra Small Devices by MEMS
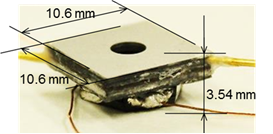
MEMS technology can reduce huge mechanical devices even into millimeter size. Turbine generator system, usually, is more than 10m. In our project, reduced size generators of 5 to 10mm are realized. These generators are combined with MEMS air turbines and multilayer ceramic magnetic circuits. Also, we have developed miniaturized electromagnetic motors.
Artificial Spinal Cord Hardware Neural Networks CMOS IC
Most of the control system of the commercial robots are micro processor based digital control. However, control systems of real organism, including human beings, are neural networks inside their brains. In our research, electrical circuits imitate real neural networks and replace them with the hardware neural networks.
Usually, research activity of the neural networks are done by mathematical models of computer calculations. However, the amount of the calculation is huge and then the real time control is impossible with current computer. We use hardware because the real time control is possible. Also, several hundred thousand neurons can be integrated in CMOSIC.
Brain Machine Interface for Humanoid Robot

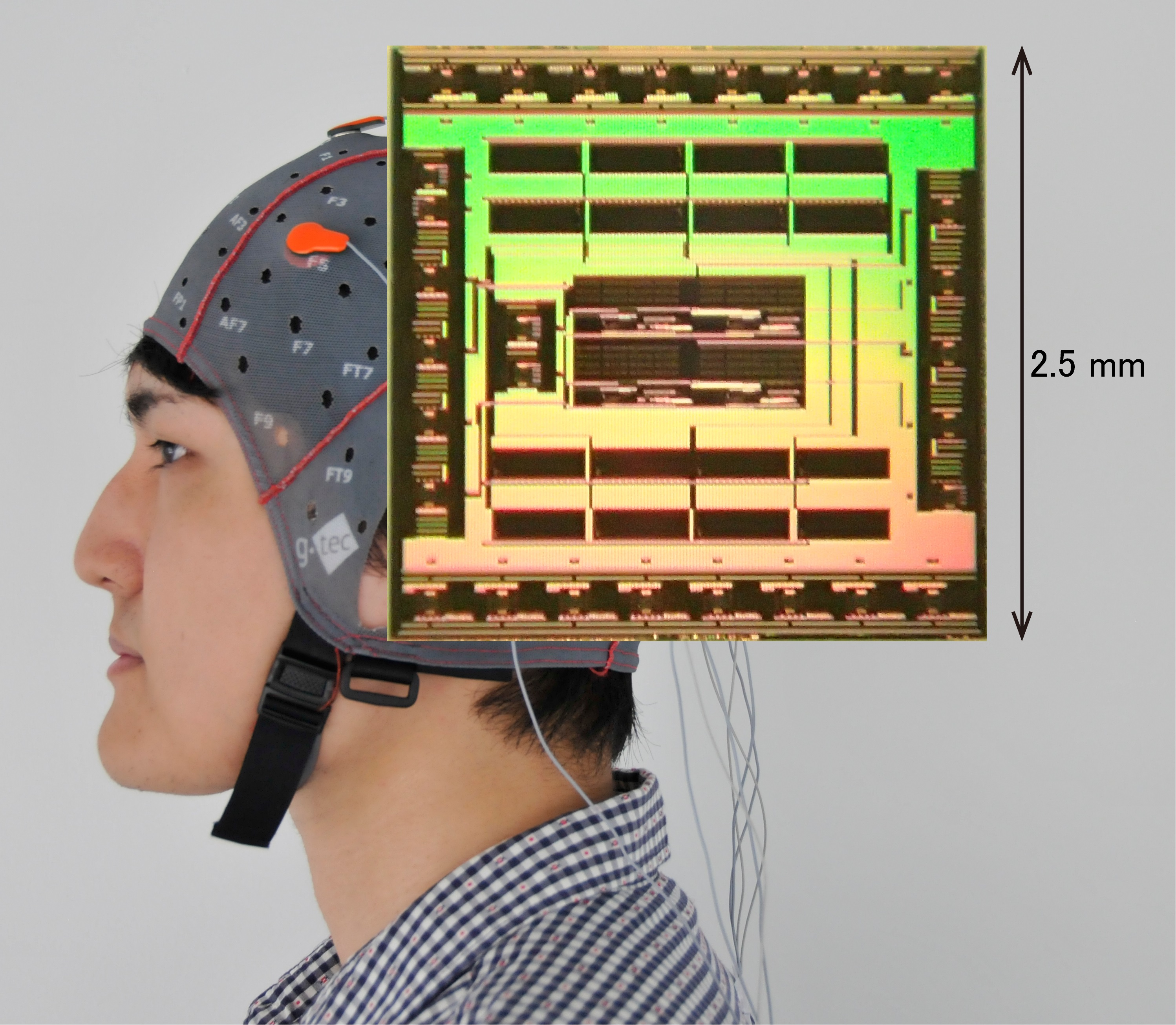
This topic started 2014. The project leader is Dr. Saito. Acquiring analyzing brain waves of human beings during a certain motion, then the humanoid reproduces this motion. In this research the brain wave is collected by distributed non touch electrodes and a real size upper humanoid robot reproduce the motion. This research is supported by CST (College of Science and Technology) project of Nihon university.
Multilayer Ceramic Devices and Process
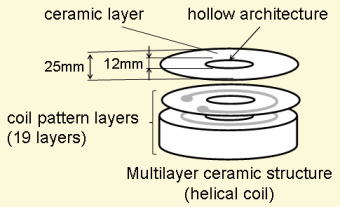
The multilayer ceramic devices with three dimensional internal electrodes is focused by our research because this complicated structure is difficult by MEMS. We have ceramic process line and materials such as LTCC for high frequency, Low temperature cofired ferrites for magnetic devices and PZT for piezo devices. In our transformer type energy transfer system, MEMS generator and MEMS motor, the multilayer ceramic technology has been used. Also, combined with photo process, we have achieved high aspect ratio internal electrodes.
Uchikoba and Kaneko Lab. Nihon Univ.
7-24-1 Narashinodai Funabashi Chiba Japan 2748501 Funabashi Campus Bd. 7 Rm. 734