Laboratory研究室和教职员工介绍
控制和机器人系统
智能机器人研究室
研究介绍
自主移动机器人的研究
目前的机器人已经从生产现场释放出来,并越来越多地用于更熟悉的地点。 在机器人和人类共存的社会里,每个人都需要一个安全的机器人。 因此,我们正在研究机器人如何支持他们的生活,同时自主移动。
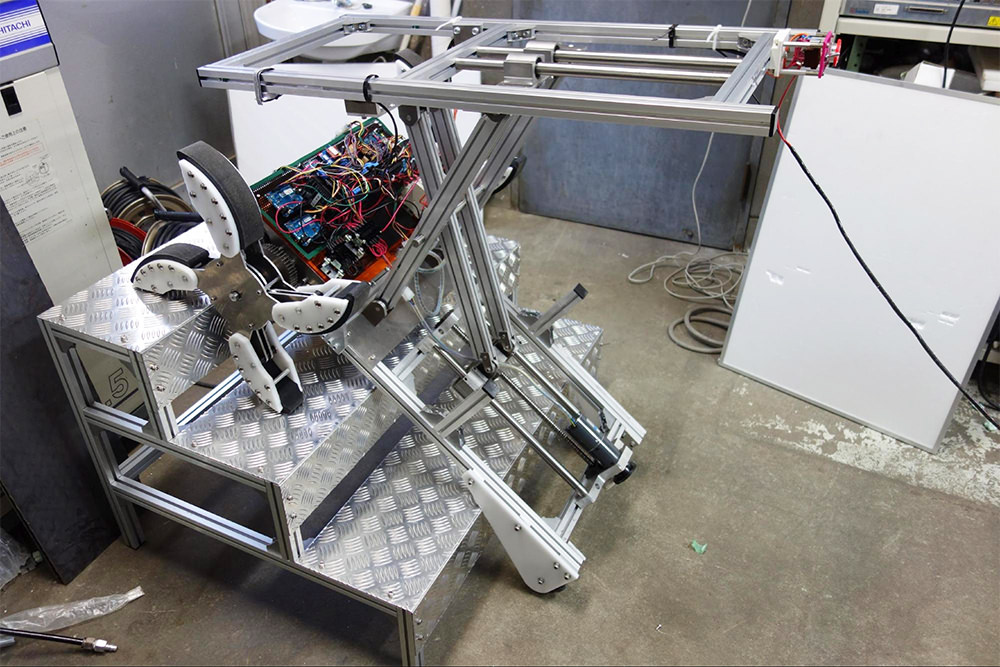
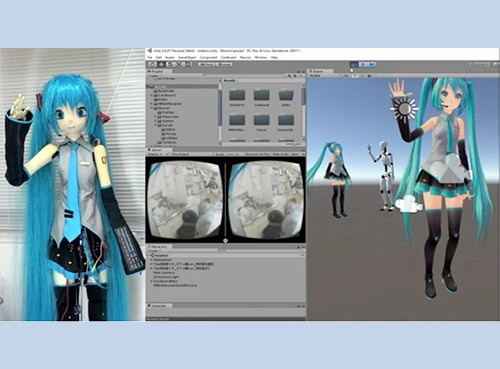
机器人需要能够移动,即使有台阶和楼梯,才能在生活空间工作。 为此,我们设计了一个部署车轮作为移动机制,旨在将其投入实际应用。 (图1)我们还在研究使用人工智能技术进行控制,以识别和移动环境,并生成移动路径,并努力实现机器人(图2),通过运动捕捉与远程人员通信。
教职员工介绍
入江 寿弘教授
- 研究领域
- 软计算 / 智能机器人 / 机械力学与控制 / 智能机械/机械系统 / 电力工程/电气设备工程 / 测量工程
- 研究关键词
- WiFi / 遥控 / 自动驾驶 / 通信机器人 / 人工生命 / 步行机器人 / 质点系统 / 模糊 / 微型空气车辆 / 图像处理
