Uchikoba Kaneko Lab.

研究概要report
医療応用・人工生物を目指した昆虫型マイクロロボットの開発

MEMS技術を利用して、超小型のシリコン部品を製作して、この部品をもとに5mm以下の昆虫型マイクロロボットを開発しています。このロボット用にニューラルネットワークCMOSICが開発されロボットに搭載されています。ロボットの駆動には人工筋肉ワイヤを用いたタイプと積層圧電素子を用いた2つのタイプがあります。電池の搭載が今後の課題ですが、電池を外部接続して昆虫のような歩行が実現しています。写真のロボットは幅4mm、全長4.6mm、高さ3.6mmです。
MEMS技術を用いた超小型デバイスの開発
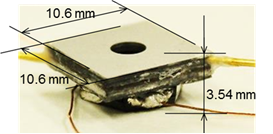
MEMS技術を用いて、超小型のデバイスの開発をしています。超小型マイクロタービン発電機は、MEMS技術によって製作したエアタービンに積層セラミック技術によって製作した磁気回路を組み合わせて、圧搾空気で発電する10mm程度から5mm程度の超小型発電機を実現しています。そのほか、超小型モータの開発も行っています。
人工脊髄ハードウェアニューラルネットワークICの研究
現在のロボットの操作はディジタル制御というコンピュータを利用したものがほとんどの場合用いられています。しかし、実際の生物では脳の中にある神経回路網という全く違うメカニズムが存在します。この研究では、生物の神経細胞の単位であるニューロンを電子回路で置き換えるハードウェアニューラルネットワークを研究しています。
一般的にはコンピュータを用いた計算でニューラルネットワークを研究する手法がありますが、計算量が膨大でロボットをリアルタイムで動かすのには問題があります。ハードウェアならばリアルタイムに動作して、しかも、CMOSIC技術で集積化することによって数十万個のニューロンを扱うことができます。本研究では生物の脊髄を手本に反射による運動生成をニューラルネットワークICで再現します。
ヒューマノイドロボットに適用するブレイン・マシン・インターフェースの研究

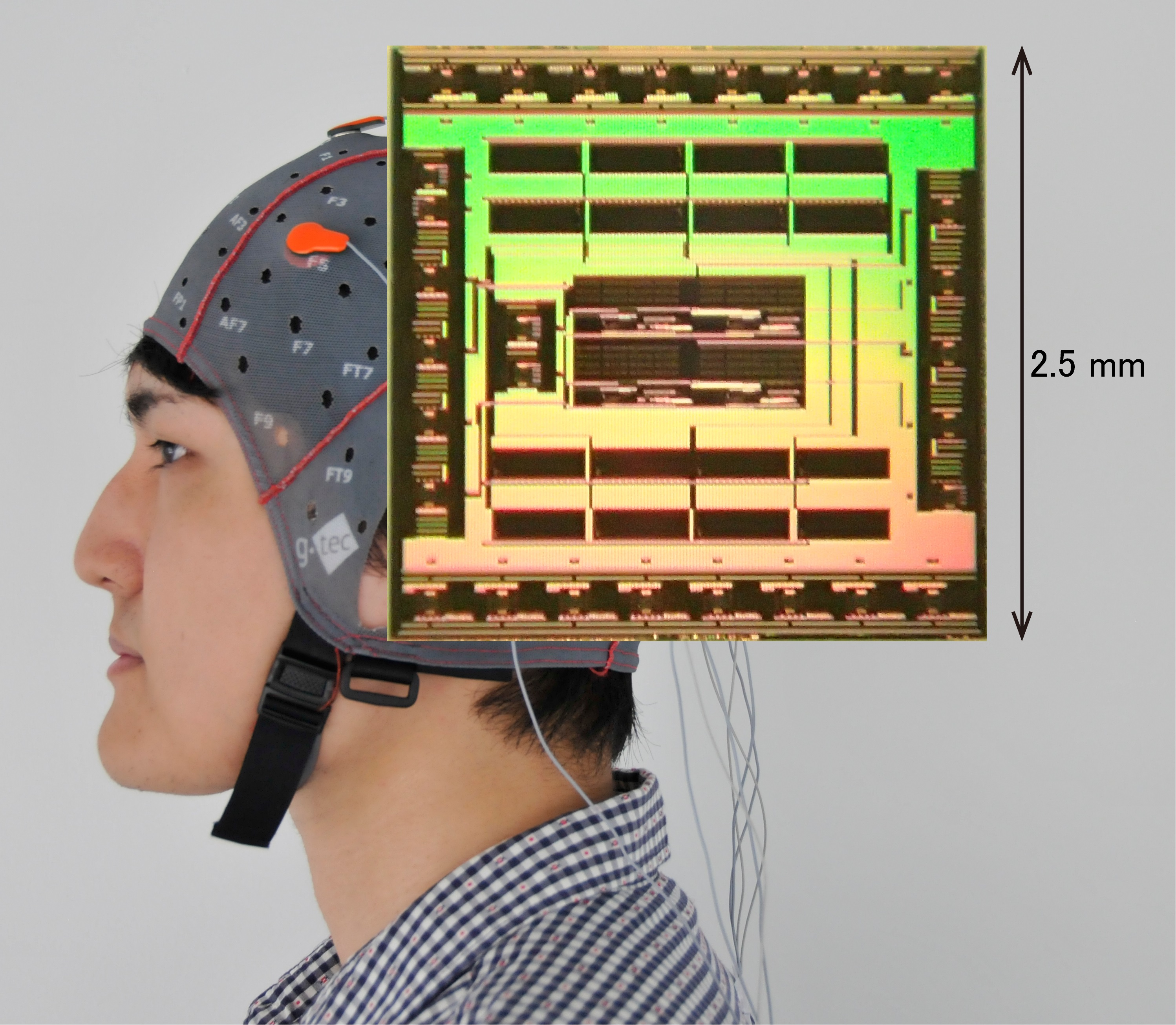
平成26年度〜27年度日本大学理工学部研究プロジェクトテーマに関する研究です(研究代表者:齊藤健)。人間が実際に運動を行う際の脳波を読み取り、この脳波をもとにロボットをうごかすことを目的としています。研究に際しては被験者に非接触電極を装着し双腕上半身ロボットを操作することを行います。
積層セラミックデバイスとプロセスの研究
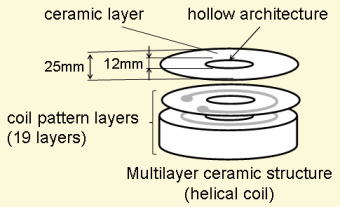
超小型で3次元電極構造を内蔵できる積層セラミックデバイスに着目しています。研究室には製造プロセスがあり、非磁性高周波材料であるLTCCと磁性材料である低温焼結フェライト、また、圧電材料であるPZTの製作をしています。トランス型電力伝送でデバイスの小型化、MEMS発電機・モーターなどの磁気回路も積層セラミック技術を用いています。また、フォトプロセスと併用して高アスペクト比内部導体パターンの形成にも成功しています。
日本大学 理工学部 内木場・金子研究室
〒274-8501
千葉県船橋市習志野台7-24-1