
主に地震等の災害現場において,倒壊した建物等の中から要救助者を発見するためのロボットの研究です.このロボットには,要救助者のバイタイルサインを取得するために,カメラ・Co2センサ・温度センサ・マイクロフォンなどが搭載され,どこに・どのような状態の要救助者がいるか等の情報を含んだ地図を作成する機能が要求されています.
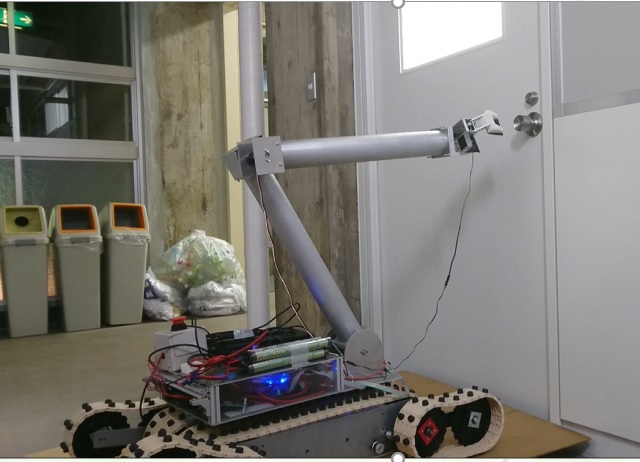
ビル内等を広範囲に探索するためには,ドアを開けて複数の部屋を順次探索する必要があります.そのために,AIを用いてドアノブの位置・形状を認識し,自律的にドア開け作業を行う研究を行っています.
走行路面が水平な場合の研究例は多数ありますが,災害現場等の不整地上を走行しながらドア開け作業をおこなう研究を行っています.
(左図は研究室のドア)
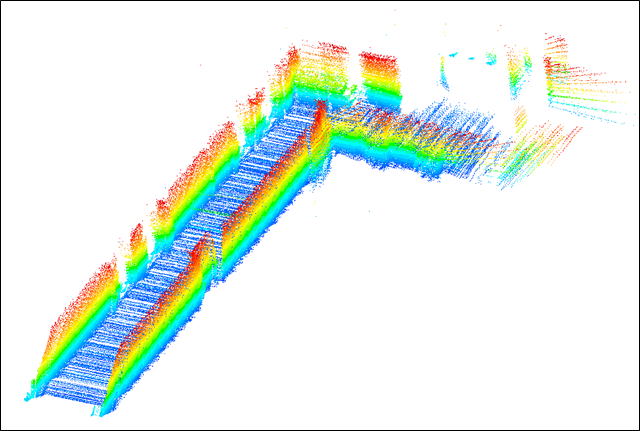
未知環境において,広範囲に要救助者を探索するためには,ロボットに搭載されたセンサ情報を基準座標にマッピングしながら,地図を作成し自己位置を確認しながら走行する必要があります.このような地図作成と自己位置同定を同時に行うことをSLAM(Simultaneous Localization And Mapping)と呼びます.
当研究室では,SLAMにより作成した地図を利用してロボットの作業計画に利用する研究を行っています.
(左図は大学の建物内)
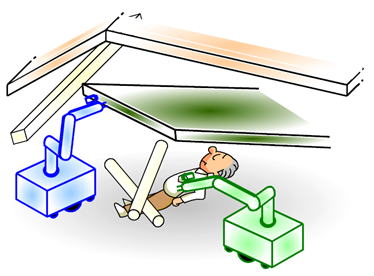
図のような,要救助者に覆い被さった千差万別な形状・状態のがれきを撤去するロボットの研究を行っています.
このとき,周囲環境やがれきの状態・種類を自律的に認識・判別して作業計画を立てたり制御したりする方法について研究を行っています.
この時,AI(人工知能)を用いて対象物を検出すると共に.,複数方向から環境や対象物のRGBデータと3次元データを取得・マージし,正確な3次元データを構築し,障害物回避などを行いながら,がれきを撤去する手法について研究を行っています.
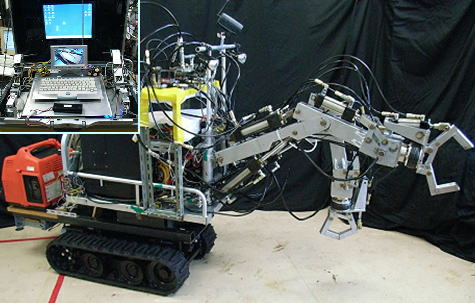
図は製作した油圧駆動式のがれき撤去レスキューロボットです.100kg程度のがれきを持ち上げることができるロボットアームが2本搭載されています.また操作コントローラとして,マスタースレーブ方式を採用し,操縦者がロボットのアーム形状と同じコントローラを操作してマニュアル操縦することができます.これにより,ロボットの自律動作と操縦者のマニュアル動作を組み合わせて作業を遂行します.
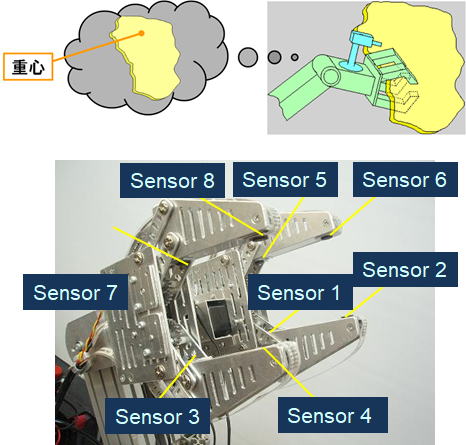
千差万別な未知がれきに対して,人間は見た目と手で持った感覚で,どこをもって持ち上げれば良いかを判断しています.
この機能をロボットで自律的に実現するために,ハンドの指先に力センサを取り付け,カメラから得られた画像情報を用いて対象物の形状や大きさを認識し,少し持ち上げてその時の力センサ情報から,対象物の材質を推定し,ハンドの把持力を制御します.また同時に対象物の重心位置を推定し,できる限りその位置に近い箇所を持ち,撤去作業を行う研究を行っています.
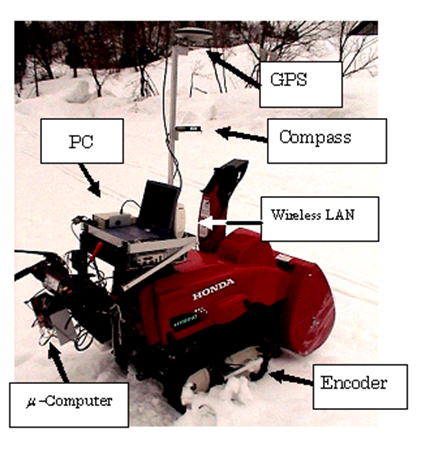
雪国において,除雪作業は大変な労力である.大きな幹線道路や大規模駐車場はグレーダー・ブルドーザー等で除雪を行うが,路地裏や中小規模は重機が侵入できず問題となる.本研究では,市販の除雪機に各種センサやコンピュータを搭載し,自律的に作業計画を立て除雪作業を行う除雪レスキューロボットの研究開発を行っている.